



Tại sao phải sử dụng cảm biến cho xi lanh khí nén?
Cảm biến vị trí tuyến tính xi lanh khí nén được sử dụng để phát hiện vị trí tuyến tính của piston trong quá trình hoạt động. Các xi lanh khí nén thường được chế tạo với một nam châm đã được gắn sẵn bên trong pít-tông, do đó có thể sử dụng cảm biến tiệm cận từ tính (nếu muốn). Tùy thuộc vào vị trí gắn cảm biến, nó có thể phát hiện các vị trí mở rộng, rút lại hoặc các vị trí riêng lẻ dọc theo thân xi lanh. Nhiều cảm biến cũng có thể được gắn vào một xi lanh khí nén cho nhiều vị trí phản hồi vị trí. Xi lanh khí nén sử dụng cảm biến vị trí cho phép tăng cường bảo mật và phản hồi để đảm bảo vị trí pít-tông cho các ứng dụng quan trọng.
Cách gắn cảm biến xi lanh khí nén
Hai loại thân xi lanh khí nén phổ biến nhất là dạng thanh (như ISO 15552) hoặc tròn (như ISO 6432). Tùy thuộc vào loại thân, có các phương pháp lắp khác nhau. Phương pháp lắp đặt cũng có thể thay đổi với các loại cảm biến khác nhau, vì vậy điều quan trọng là phải hiểu loại thân xi lanh bạn có với loại cảm biến.
Ví dụ xy lanh khí SMC RDQB32-45 dạng vuông và xy lanh dạng tròn như CDJ2B10.
Các loại xi lanh khí nén
Xi lanh hình chữ nhật

Xi lanh định hình có hình chữ nhật và có hai phương pháp dễ dàng để gắn cảm biến vào thân xi lanh. Đối với xi lanh khí nén tuân thủ ISO 15552, có các rãnh dọc theo thân để lắp cảm biến như trong Hình 2. Sau đó, cảm biến (C) được siết chặt vào vị trí bằng vít định vị (B) bằng tua vít (A). Các xi lanh định hình khác có các thanh giằng chạy dọc theo chiều dài của thân xi lanh ở cả bốn góc. Các cảm biến có thể được gắn vào thanh giằng và trượt đến vị trí thích hợp dọc theo chiều dài của xi lanh.
Xi lanh hình trụ tròn

Xi lanh hình trụ tròn thường nhỏ hơn, chẳng hạn như xi lanh theo tiêu chuẩn ISO 6432. Cảm biến vẫn có thể được gắn vào chúng bằng cách sử dụng một dải tròn để đi xung quanh vỏ hình trụ. Dải cần phải được chỉ định phù hợp với đường kính của hình trụ. Sau khi được gắn, cảm biến và dải có thể trượt dọc theo chiều dài của xi lanh và sau đó được gắn chặt vào vị trí. Có thể thấy xi lanh khí nén ISO 6432 có gắn cảm biến trên đó trong Hình 3.
Các xác định kích thước của một xi lanh khí nén
Mỗi dòng xy lanh khí nén sẽ có mục đích sử dụng khác nhau. Do đó, cần xác định các yêu cầu về kích thước và công suất của xi lanh khí nén cho từng ứng dụng. Nhưng câu hỏi đặt ra là, làm thế nào để chúng ta biết khi nào cần sử dụng xy lanh khí nén? Và kích thước xy lanh khí nén bao nhiêu?
Nói một cách đơn giản, bạn có thể xác định diện tích bên trong piston khí nén bằng công thức:
F = P.A
Trong đó P là áp suất, A là diện tích và F là tổng lực. Vì vậy, chúng ta có thể tính diện tích bằng cách sử dụng:
A = F/P
Bởi vì chúng ta đã biết chúng ta phải sử dụng bao nhiêu lực lượng để thực hiện loại công việc mà chúng ta quan tâm.
Chúng ta có thể tính toán đường kính của xi lanh khí nén. Hầu hết mọi người thường nghe các kỹ sư gọi diện tích của xi lanh khí nén là lỗ khoan, điều này có nghĩa rằng xi lanh khí phải có kích thước lỗ khoan như này, để tạo không gian bằng này.
Để tìm kích thước lỗ, lấy căn bậc hai của diện tích (A) và nhân với 1,1284 để tìm đường kính. Nghe có vẻ rắc rối phải không? Nhưng nó thực sự chỉ mất vài giây với một máy tính.
Nói chung xi lanh khí nén chỉ có các đường kính lỗ khoan cụ thể.
- 12mm
- 16mm
- 20 mm
- 25mm
- 32mm
- 40mm
- 50mm
- 63mm
- 80mm
- 100mm
Do đó, việc tính toán các giá trị khác nhau, cho dù đó là cường độ, áp suất và diện tích phải được sử dụng. Điều quan trọng là phải xác định kích thước chính xác của xi lanh khí nén.
Xem thêm Cảm biến áp suất khí nén là gì?
Tùy chọn cảm biến tiệm cận từ tính
Tất cả các cảm biến được sử dụng cho xi lanh khí nén để phản hồi về vị trí tuyến tính của pít-tông đều sử dụng từ trường. Do đó, thông thường tất cả các xi lanh khí nén đều đã có một nam châm nằm bên trong piston. Tuy nhiên, điều quan trọng là phải xác minh thông số kỹ thuật thiết kế này cho xi lanh khí nén của bạn nếu cần có phản hồi vị trí tuyến tính.
Công tắc switch
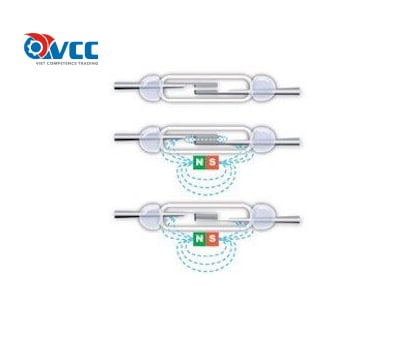
Cảm biến công tắc switch là một cảm biến tiệm cận từ tính được “BẬT” khi một từ trường thẳng hàng hướng trục được áp dụng cho nó. Các cực từ của nam châm thẳng hàng nằm cạnh nhau trong mặt phẳng dọc trục. Khi nam châm được căn chỉnh theo trục tiếp cận cảm biến sậy, một từ trường song song với công tắc sậy được tạo ra.
Công tắc sậy bao gồm một cặp sậy kim loại sắt từ, được đặt trong một ống thủy tinh kín. Nếu không có sự hiện diện của từ trường (hình trên cùng Hình 4), các thanh kim loại sẽ được tách ra và cảm biến sẽ ở trạng thái “TẮT”. Khi pít-tông xi-lanh vượt qua công tắc và tác dụng một từ trường đủ mạnh để hút các thanh sậy lại với nhau (ảnh ở giữa Hình 4), cảm biến sẽ được “BẬT” (hình dưới Hình 4).
So với các tùy chọn cảm biến khác, công tắc switch tiết kiệm chi phí và có thể hoạt động với điện áp AC hoặc DC. Ngoài ra, cảm biến công tắc switch có mức tiêu thụ điện năng thấp khiến chúng phù hợp với các ứng dụng có yêu cầu tiêu thụ điện năng. Do tính chất cơ học của việc chuyển đổi tiếp điểm switch, cảm biến công tắc switch có những hạn chế. Đầu tiên, các tiếp điểm chuyển mạch có số chu kỳ chuyển mạch hữu hạn và sẽ yêu cầu bảo trì trong suốt tuổi thọ của máy. Tiếp theo, cảm biến công tắc switch không phù hợp với các ứng dụng tiếp xúc với độ rung hoặc sốc cao. Sốc và rung cao có thể khiến các điểm tiếp xúc của công tắc kêu lạch cạch gây ra tín hiệu không chính xác.
Các đặc tính chuyển đổi của công tắc sậy cũng có thể gây ra chuyển đổi kép ngoài ý muốn.
Chuyển mạch kép là khi đầu ra cảm biến chuyển “BẬT” và “TẮT” hai lần trong khi nam châm hình trụ đi qua công tắc sậy một lần. Công tắc kép sai của đầu ra cảm biến là do cường độ không đồng đều của trường lực nam châm. Cường độ của từ trường mạnh nhất ở mỗi cực của nam châm và yếu nhất ở tâm giữa mỗi cực. Nếu nam châm pít-tông không đủ mạnh, nó có thể khiến đầu ra của công tắc chuyển đổi kép khi nó đi qua cảm biến. Cuối cùng, so với các cảm biến trạng thái rắn, công tắc sậy kích hoạt tương đối chậm, khiến chúng không phù hợp với các ứng dụng cần thời gian phản hồi nhanh. Tuy nhiên, cảm biến công tắc sậy cho xi lanh khí nén được sử dụng rộng rãi do chúng tương đối rẻ so với các cảm biến khác, không cần nguồn dự phòng, có thể hoạt động với tải DC hoặc AC,
Cảm biến hiệu ứng hall
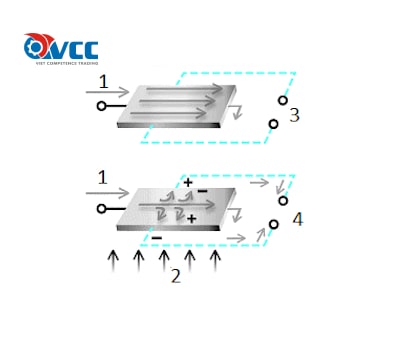
Cảm biến hiệu ứng Hall là một cảm biến tiệm cận từ tính được “BẬT” khi một từ trường thẳng hàng hướng tâm được áp dụng cho nó. Một nam châm thẳng sẽ tạo ra từ trường vuông góc với từ trường của cảm biến hiệu ứng Hall như trong Hình 5.
Không giống như công tắc switch, cảm biến hiệu ứng Hall là thiết bị thể rắn và được thiết kế với các thành phần khác nhau. Công tắc sậy phụ thuộc vào các tiếp điểm cơ học chuyển động để cung cấp đầu ra cảm biến. Các thiết bị thể rắn cung cấp đầu ra cảm biến bằng cách sử dụng các mạch điện mà không cần các bộ phận chuyển động. Cảm biến hiệu ứng Hall bao gồm một chất bán dẫn có dòng điện liên tục chạy qua nó, có thể thấy ở hình trên cùng trong Hình 5.
Khi một từ trường được đặt hướng tâm (2) vào dòng điện (1) như hình dưới hình ảnh trong Hình 5, các electron tích điện tách sang các phía đối diện của chất bán dẫn dựa trên sự phân cực. Sự phân tách của các electron tích điện tạo ra một hiệu điện thế trên mạch hiệu ứng Hall (4). Khi điện áp đầu ra trên mạch lớn hơn ngưỡng chuyển đổi, đầu ra của cảm biến được chuyển sang “BẬT”.
Ưu điểm của cảm biến hiệu ứng Hall
Không giống như cảm biến công tắc switch, cảm biến hiệu ứng hall không bao gồm các bộ phận chuyển động và sẽ có diện tích lắp đặt nhỏ hơn. Thiết kế trạng thái rắn làm tăng tuổi thọ của cảm biến do hoạt động không bị mài mòn và cũng làm cho chúng có khả năng chống sốc và rung. Không cần phải khắc phục quán tính của các thành phần cơ học, cảm biến hiệu ứng Hall cũng phù hợp cho ứng dụng quan trọng về thời gian, yêu cầu chuyển đổi nhanh.
Tương tự như cảm biến công tắc switch, định hướng nam châm rất quan trọng để hoạt động đúng. Ngoài ra, cảm biến hiệu ứng hall có độ nhạy thấp. Tùy thuộc vào đường kính và độ dày của thân xi lanh, đầu ra chuyển đổi có thể không kích hoạt đúng cách. Tương tự như công tắc sậy, các điểm chuyển đổi kép cũng có thể thực hiện được do cảm biến có độ nhạy thấp.
Cảm biến từ điện trở dị hướng
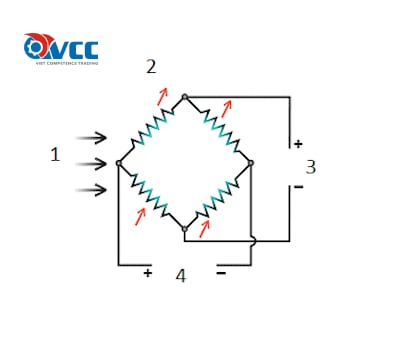
Cảm biến từ điện trở dị hướng (AMR) là một cảm biến tiệm cận từ tính ở trạng thái rắn được “BẬT” khi một từ trường xuyên tâm hoặc hướng trục được áp dụng cho nó. Một mạch AMR bao gồm mạch cầu Wheatstone (Hình 6) để đo điện trở. Điện trở của cảm biến AMR sẽ giảm theo cường độ của từ trường, dẫn đến độ dốc điện áp lớn hơn trên mạch AMR. Khi điện áp trên mạch lớn hơn ngưỡng chuyển mạch (Hình 6 số 3), đầu ra cảm biến được chuyển sang “ON” như trong Hình 6 số 4.
Tương tự như cảm biến hiệu ứng hội trường, cảm biến AMR hoạt động nhanh, không bị mài mòn và có khả năng chống sốc và rung. Lợi ích của cảm biến AMR là độ nhạy thấp hơn so với cảm biến Hall và phản ứng tốt với những thay đổi về cường độ từ trường. Điều này dẫn đến khả năng phát hiện pít-tông được cải thiện ở khoảng cách xa hơn nhờ khả năng phát hiện các trường nam châm yếu hơn.
Khả năng xảy ra các điểm chuyển đổi kép bị loại bỏ do độ nhạy cao hơn. Ngoài ra, các cảm biến sẽ phát hiện các nam châm được từ hóa theo chiều dọc và hướng tâm. Cảm biến AMR nhỏ gọn hơn cảm biến công tắc sậy và có chi phí cạnh tranh. Một nhược điểm của cảm biến AMR là chúng thường liên tục rút dòng điện. Đối với các ứng dụng có yêu cầu năng lượng thấp, cảm biến công tắc sậy có thể là lựa chọn cảm biến phù hợp hơn.
Cảm biến từ điện trở khổng lồ
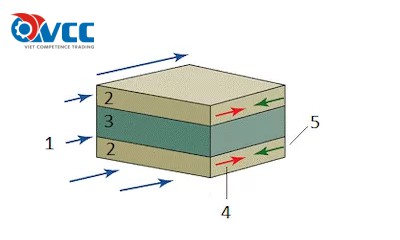
Cảm biến từ điện trở khổng lồ (GMR) là một cảm biến tiệm cận từ tính ở trạng thái rắn được “BẬT” khi một trường nam châm hướng tâm hoặc hướng trục được áp dụng cho nó. Cảm biến GMR bao gồm các lớp khác nhau của các lớp dẫn từ tính và không từ tính xen kẽ như trong Hình 7 số 2 và 3. Tương tự như cảm biến AMR, khi một từ trường được đặt vào cảm biến, đặc tính điện trở của mạch thay đổi tạo ra độ dốc điện áp cao hơn trên toàn mạch khi từ trường tăng. Ví dụ, khi có từ trường (Hình 7 số 1), điện trở của mạch giảm cho phép dòng điện chạy qua (Hình 7 số 4) và điện áp trên mạch tăng. Khi điện áp trên mạch lớn hơn ngưỡng chuyển đổi, đầu ra của cảm biến được chuyển sang “ON”.
Cảm biến GMR mang lại lợi ích tương tự như cảm biến AMR, tuy nhiên, chúng thậm chí còn nhạy cảm hơn với sự hiện diện của từ trường. Độ nhạy cao cũng cho phép cảm biến có độ gọn cao, phù hợp với các xi lanh nhỏ hơn và ngắn hơn. Mặc dù độ nhạy cao là một lợi ích cho các ứng dụng cần phản hồi cảm biến ngay lập tức, nhưng nó có thể gây ra tín hiệu đầu ra ngoài ý muốn nếu bị nhiễu bởi từ trường xung quanh. Ví dụ: môi trường có nguồn điện cao gần đó (động cơ AC hoặc nguồn điện AC đến) có thể làm nhiễu tín hiệu cảm biến và gây ra lỗi ngoài ý muốn.
Lựa chọn cảm biến phù hợp với nhu cầu sử dụng
Đối với phần lớn các ứng dụng, cảm biến Switch thường được sử dụng nhiều hơn. Chúng là công nghệ đã được chứng minh và có vòng đời đủ dài cũng như khả năng chống rung để xử lý các ứng dụng phổ biến. Tuy nhiên, một số ứng dụng đặc biệt cần lựa chọn cảm biến phù hợp có thể dựa theo các tiêu chí:
- Môi trường: Xi lanh có tiếp xúc với rung động hoặc va chạm lớn không? Nếu vậy, một cảm biến trạng thái rắn sẽ hoạt động đáng tin cậy mà không có tiếng kêu đầu ra. Các cảm biến trạng thái rắn phổ biến là cảm biến hiệu ứng hội trường, AMR và GMR. Ngoài ra, cảm biến sẽ ở trong một môi trường sạch khép kín hay nó yêu cầu vỏ bảo vệ cao, chẳng hạn như IP67. Cân nhắc về nhiệt độ cũng nên được tính đến.
- Tốc độ chuyển đổi: Tốc độ chuyển đổi đầu ra quan trọng như thế nào đối với ứng dụng của bạn? Cảm biến trạng thái rắn cung cấp thời gian chuyển đổi nhanh hơn. Các cảm biến trạng thái rắn phổ biến là cảm biến hiệu ứng hội trường, AMR và GMR.
- Loại đầu ra: Loại tín hiệu đầu ra nào được yêu cầu của hệ thống điều khiển? Tín hiệu đầu ra PNP và NPN có sẵn cho các thiết bị trạng thái rắn.
- PNP: Đầu ra PNP cung cấp một đường dẫn để cung cấp năng lượng dương cho đầu ra. Điều này cũng thường được gọi là “cảm biến tìm nguồn cung ứng”. PNP được coi là phổ biến hơn ở Bắc Mỹ và Châu Âu.
- NPN: Đầu ra NPN cung cấp một đường dẫn để cung cấp cho mặt đất. Điều này cũng thường được gọi là “cảm biến chìm”. NPN được coi là phổ biến hơn ở châu Á.
- Đặc điểm tín hiệu chuyển mạch: Công suất chuyển mạch và các yêu cầu hiện tại của hệ thống điều khiển là gì? Cảm biến được chọn phải tương thích để hoạt động bình thường.
- Gắn kết: Những tùy chọn lắp đặt nào có sẵn cho mỗi loại xi lanh? Tùy thuộc vào việc bạn có một xi lanh định hình có rãnh hoặc thanh giằng hay nếu bạn có một xi lanh tròn, các kiểu lắp sẽ thay đổi.
- Định hướng nam châm: Công tắc sậy và cảm biến hiệu ứng hội trường yêu cầu định hướng chính xác của từ trường được áp dụng để hoạt động bình thường. Do đó, cảm biến phải được lắp đúng hướng với pít-tông.
- Bảo vệ mạch: Nếu cần, các cảm biến có thể kết hợp các biện pháp bảo vệ mạch, như ngắn mạch, phân cực ngược và bảo vệ đột biến.
- Đấu dây: Đấu dây nguồn điện cho cảm biến sẽ khác nhau tùy thuộc vào việc cảm biến là cảm biến trạng thái rắn (tức là AMR, GMR, hiệu ứng Hall) hay cảm biến sậy. Mỗi cảm biến thường có đèn LED để chỉ báo cách đấu dây chính xác.
Ví dụ: nếu cực của nguồn điện cho công tắc sậy bị đảo ngược thì đèn LED ở cảm biến sẽ không sáng. Cảm biến công tắc sậy thường có cấu hình 2 dây trong khi cảm biến trạng thái rắn có 3 dây. Ngoài dây dương và dây âm, dây thứ ba sẽ được sử dụng để kết nối với tải. Việc đấu dây đúng của dây tải phải luôn được xác minh trước khi cấp nguồn vì việc đấu dây sai có thể làm hỏng cảm biến vĩnh viễn.
So sánh cảm biến xi lanh khí nén
| Công tắc switch | Hiệu ứng Hall | AMR | GMR | |
| Kích thước | Lớn | Nhỏ bé | Vừa phải | Nhỏ bé |
| Sự thi công | Cơ khí | Thể rắn | Thể rắn | Thể rắn |
| Cường độ nam châm cần thiết | Vừa phải | Cao | Thấp | Thấp |
| Nhạy cảm | Vừa phải | Thấp | Cao | Cao |
| Ổn định nhiệt độ | Vừa phải | Thấp | Vừa phải | Cao |
| Sự tiêu thụ năng lượng | Số không | Thấp | Cao | Thấp |
| Khả năng chống ồn | Cao | Thấp | Cao | Cao |
| Tốc độ chuyển đổi | Thấp | Cao | Cao | Cao |
| Độ bền cơ học | Thấp | Vừa phải | Cao | Cao |
| Độ bền điện | Thấp | Thấp | Cao | Cao |
| Điểm chuyển đổi kép | Đúng | Khả thi | Không | Không |
Mr. Danh
Bài viết liên quan
- Van Điều Áp Khí Nén Là Gì? Phân Loại & Cách Chọn Lắp Đặt
- Nguyên Lý Hoạt Động Của Bộ Lọc Tách Nước Khí Nén (Air Filter)
- Air Management System: Giải Pháp Tiết Kiệm 62% Năng Lượng Khí Nén
- Nhà Cung Cấp Xi Lanh Khí Nén & Thiết Bị Tự Động Hóa Uy Tín – VCCTrading
- So Sánh Xi Lanh Khí Nén: Festo, SMC Hay AirTAC?
- Ứng Dụng Xi Lanh Khí Nén Trong Ngành Lắp Ráp Ô Tô, Xe Máy: Giải Pháp & Tiêu Chuẩn Kỹ Thuật
- Ứng Dụng Xi Lanh Khí Nén Trong Ngành Chế Biến Gỗ và Sản Xuất Nội Thất
- Xi Lanh Inox Cho Máy Đóng Gói: Giải Pháp Chống Rỉ Sét & Đạt Chuẩn Vệ Sinh An Toàn
- Xi Lanh Khí Nén Có Khóa Trục: Giải Pháp Chống Rơi An Toàn
- Xi Lanh Siêu Nhỏ (Micro Cylinders): Xu Hướng Cho Ngành Lắp Ráp Điện Tử và Y Tế